Me not postied anything in a while so here we go:
First of all an update to Margin of Error, with a better looking blade:
Still waiting on a CW tournament to send as entry.
My entries for GTMLive (happening sometime between now and never):
Demon:
Tried to do something resembling a propper overhead twackbot, but it kinda became a mess to be fair, also tried to experiment with customized py. Not really usefull in the end, but might try again some other time.
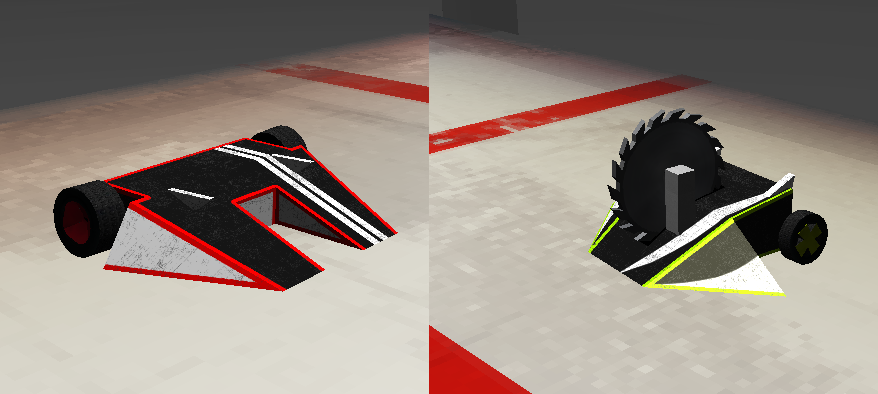
Friction Live:
Since it was a UK live event themed tournament, that meant no spinners, so I decided to make a live event safe version of Friction Saw, since that's something people actually IRL. Now it has a jaw with spike strips.
CounterFlip:
Many people have started to use multiple bursts to make their flippers, something that has been done in real robots too. Problem for me is that in Ra2 you can't have multiple bursts attached to the same solid flipper panel, so you have a case of the twin flipper arm, something I'm not very fond of.
A solution I have found is to instead of having the flipper arm attached to the burst, The main part of the robot IS the flipper arm, where the bursts are attached and THEN the wheel pods are attached to the bursts. When flipping the wheel pods lift the main part of the robot as the flipper arm.
Now after all that, the results aren't that great, I need to refine this method further.
Other bots:
Hammerhead
Originally made for Orc's tourney and had to be based on S3 (thanks OBJ2RA2! Again!).
I then decided to use the robot for Badger's International Wars as the italian entry.
Because of that I made a slightly different skin:
Unnamed Robot
Still haven't named this bot, as it's not finished completely, but the Idea was to make a robot inspired by Crazy Susan (by the same builder of The Ringmaster).
Because of the original design, I made a chassis with OBJ2RA2, which ended up massive with not much usefull room and weight left, so in the end I dropped the project after this first proof of concept (for now).
Hot Air:
When you are bored and ask weird robots to make.
The base of the robot was "make a walker with judge thruster powered VS".
To move it uses storm bursts that allows the robot to move though recoil of the burst and wonky physics (not sure if this actually counts as walker).
The VS part is pretty straight forward, two judge thrusters angled to make the spinner spin.