This section allows you to view all posts made by this member. Note that you can only see posts made in areas you currently have access to.
Messages - philetbabe
Pages: 1 ... 3 4 5 6 7 8 9 [10] 11 12 13 14 15 16 17 ... 26
181
« on: June 05, 2009, 07:12:56 AM »
this image gives me the vertigo
182
« on: June 05, 2009, 07:10:03 AM »
i like the way your pictured your bots , even the worse one has something pleasant.
183
« on: June 04, 2009, 03:07:39 AM »
i will have a look at that.... Trovaner, do you have try any experiment on this information before ?
i've seen there is also
#ai_bindings = [] # list of AI scripts & which bots use them
which should give me quickly the information bot<->AI
the use of such information should be to switch between HS and VS
to study so.
184
« on: June 03, 2009, 09:49:51 AM »
Here are preidictions who I think will win in losers bracket round 1 and winners bracket round 3.
...
it's funny, but all of your predictions are the opposite of Naryar's ones. ! it should be interesting to comment them shortly.
185
« on: June 03, 2009, 07:51:26 AM »
... continuation of post above ... here is the corrected shiftWeapon AI. (servo motor change angle from time to time) Bug corrected : no more crash after stoping a fight / parameter servospeed taken into account improvment : localized code : yet the change of angle is conditionned by a timer. other condition may be defined (written in python) in the function ShiftConditionOk(self). bindings parameter : all are optionnal 'range' : range for spin motor, defualt 99 'servodelta' : optionnal : angle tolerance. the higher, the less the servo oscillates but the servo may stabilizes in an ngle far from the 'aiming' one. default : 0.05 (low) 'servospeed' : speed turn of the servo, default 100 'servonose' :angle correction due to attachement of mototrs or extenders. default value 1 typical calue : -1, 0.25,-0.25,1 'servoNbPos' : number of different position switched. default : 2 if value = 2, servo change from angle 0 to angle math.pi value = 3 is good for tribar value = 4 is good for attachement with 4 extenders. 'servoTimer' : duration (abstract value) between 2 switch of position. default 15 (low) Sample bindings (for the bots below)
list.append( ("shiftweapon I", "ShiftWeapon3", { 'nose': math.pi, 'servospeed':60, 'servodelta':0.15, 'servoTimer':25, 'servoNbPos':2,'weapons': (1,2,3,4) }) )
list.append( ("shiftweapon II", "ShiftWeapon3", { 'nose': math.pi, 'servospeed':30,'servodelta':0.05, 'servoTimer':35, 'servoNbPos':4,'weapons': (1,2,3,4) }) )
the sample bots (stock) in the .rar : 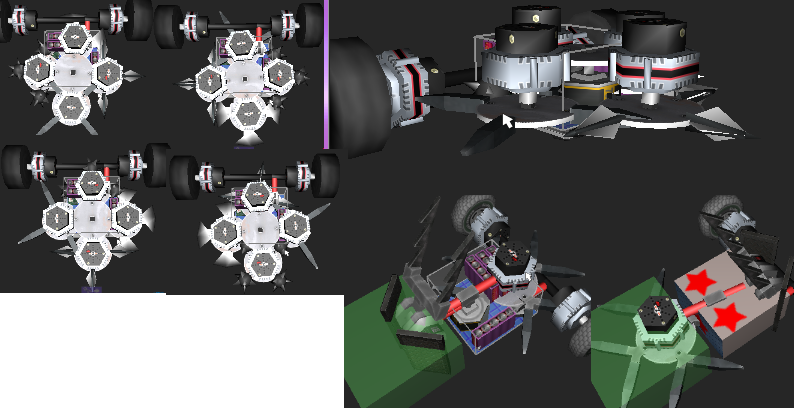 the Ai : https://gametechmods.com/uploads/files/2762shiftweapon.rarnext subject of work : a 2 servo motor bots, mounted on each of its flank, and that should works like 'arms' ... to think about.
186
« on: June 02, 2009, 04:36:34 PM »
here is the video for post #67 : bots that feels better when inverted
[media]https://gametechmods.com/includes/flvfiles/joebloeai.flv[/media]
also featuring a SOW bot (see SOW thread).
187
« on: June 02, 2009, 12:55:24 PM »
nice, funny and useful for newbies,
188
« on: June 02, 2009, 08:35:20 AM »
That's cool Phil, nice work. Yea, how about a vid? . i'm slow (i suck ?) at video because, most of the time, i wrote AI between 12h to 14h in my work and there i have not Fraps and, even if i had it, i am not allowed to upload/download video. so i have to do them when i'm back home, and there, i have so much to do that i am distracted most of the time. about the bot you talk above, is it the one in your showcase that looks like ACAM ? BTW, this is not flattery, but your showcase is one of the best with flying planes, tanks, grasshoper, etc. i like it much . Can you expound a bit more on some detail about your cool bot here.. the cool bot is JoeBlo one. i just try to ai it. the idea of the previous bot is to have extender attached to servo motor, this last one will change its position after a certain amount of time (role of the countdown parameter). Each change of position will make the servo motor rotate a certain angle which is calculated from the value of the parameter 'servoNbPos'. this AI should be a basis for other AI that change servo motor position according to a special condition : for instance, once you've reached a certain amount of damage, or once one of your component reached a certain amount of damage I will post a better version of this AI soon. it has a bug : crash the game when i stop a match (may be because the tick function takes to long to be executed). here is the video : [media]https://gametechmods.com/includes/flvfiles/joebloeai.flv[/media]
189
« on: June 02, 2009, 07:36:26 AM »
Just a question...
What .py should I use for a thing that works like Omni.py but with just 2 independent smartzone-using weapons? (hammer/poker hybrid actually) Topknot should be good, oterwise, there have been a rewriting (less specialized in its name of controler/zone) that is shown here : this is in JoeBloe thread and downloadable here (called omni multi-zone) : https://gametechmods.com/forums/showt...zone#post24825
190
« on: June 02, 2009, 06:58:26 AM »
This small AI came from a request of JoeBloe whose bot have 3 weapon systems that could switch between them. see
Natural High 4 (Image removed from quote.)
for more details how does it works : As usual an analogic control named 'Servo' is attached to the servo motor. given a fixed period, the servo turns a given angle. turn angle is math.pi / parameter called 'servoNbPos' period is a calculated from a count-down which initial value is defined by the parameter 'servoTimer' here are sample bindings :
list.append( ("shiftweapon", "ShiftWeapon2", {'nose': math.pi, 'servospeed':60, 'servodelta':0.05, 'servoTimer':50, 'servoNbPos':2,'weapons': (8, 12, 14, 15) }) )
list.append( ("shiftweapon2", "ShiftWeapon2",{'nose': math.pi, 'servospeed':60, 'servodelta':0.05, 'servoTimer':50, 'servoNbPos':3,'weapons': (8, 12, 14, 15) }) )
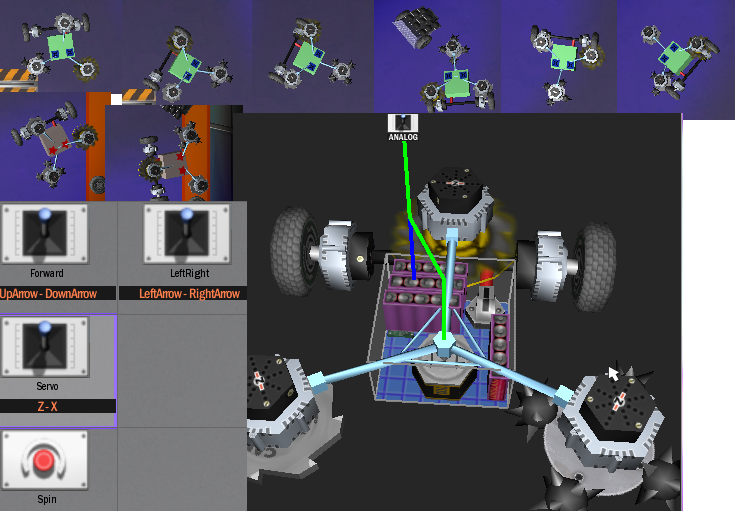 to get it (samples are stock) : https://gametechmods.com/uploads/files/shiftweapon.rar.. i know, i have to post a movie, i will. Weakness : - havoc explosion ! to do : not tested with a bot with custom zone much like JoeBloe one( AI should support CZone anyway).
191
« on: June 01, 2009, 10:58:12 AM »
#6 was my first participation in a BOTM
192
« on: June 01, 2009, 10:37:58 AM »
just 3 days left in holidays and the vote was opened ... and closed.
No time to vote.
anyway, after the battle i vote for #3.
193
« on: May 29, 2009, 07:44:11 AM »
The chassis up in the air is unique. Makes for a bit higher CG though. These are cool ideas, Phil. You're inspiring me again,... if I had the time. i have to admit that was Craaig's idea. these last times, there have been many newbie with original ideas : their bots have many weakness but new concepts are emerging.
194
« on: May 29, 2009, 07:38:41 AM »
here is my 'rebuild' stable, but slow, slow , so sloooooooooow .... that it is sometime motionless!
195
« on: May 29, 2009, 07:35:56 AM »
This a bot freely inspired from Craaig's bot  still some moblity trouble : whith those SOW bots (servo motor may turn spin-motor) the bot must be stable in all direction. i haven't found the good way to stabilize this bot. Idea (and showcase are welcomed)
196
« on: May 28, 2009, 04:59:17 AM »
i like this strange bot, i think i'm going to explorate this kind of 'up attachement'.
i think it may be vulnerable against side attack that should reverse it, Same weakness with these 3 central extenders ; You should protect them.
At last, how does this bot turn ? can't you eliminate the 2 front drive motor+wheels and replace them with stabilizer that should allows foe to get near your vertical weapon (use of skirts) ?
197
« on: May 26, 2009, 06:51:31 AM »
i like the chassis of cerberus/ R9. very re-usable.
198
« on: May 26, 2009, 06:40:15 AM »
Few words about Don Quichotte AI. 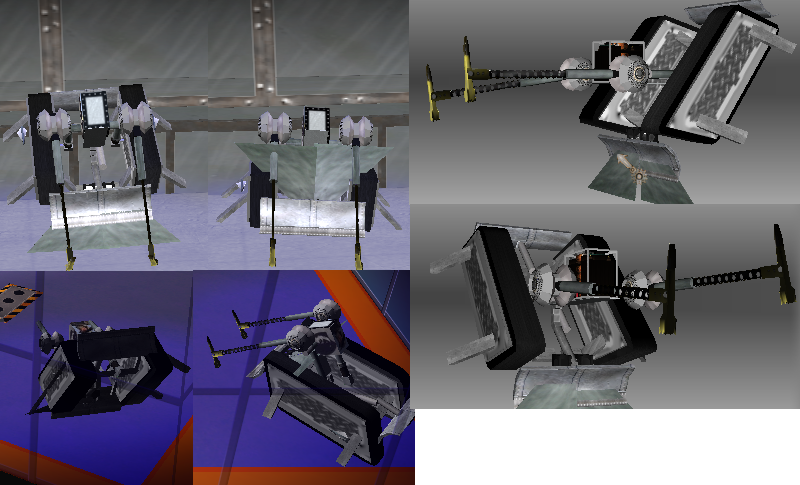 As shown on the picture above, the particularity of don Quichotte is that all of its building have been made with an angle of 45° with the chassis. So, when Aied and entering arena, the bot seems leaned (but indeed its chassis is horizontal). so, just after the count down, a 'Fire' command must be executed to restore the bot in a good position. Because i wanted not only 1 but 3 Fire command with a light delay between them, i added the code in the Tick function. here is the code added to omni.py and renamed as DonQuichotte.py : class donQuichotte(AI.SuperAI):
"donQuichotte strategy"
name = "donQuichotte"
# like omni but give 3 'Fire' command after the count down
def __init__(self, **args):
AI.SuperAI.__init__(self, **args)
[color=red]
self.reloadTime = 0
self.reloadDelay = 3
self.InverterTime = 0
self.fireDone = 0
[/color] ...
def Tick(self):
# fire weapon
if self.weapons:
[color=red]
if ( self.fireDone < 3 ) and (self.InverterTime <= 0) :
self.Input("Fire", 0, 1)
self.InverterTime = self.reloadDelay
self.fireDone += 1
[/color]
....
AI.register(donQuichotte)
199
« on: May 26, 2009, 02:13:56 AM »
no Im talking in the actual coding for a robot. like if the enemy was in one direction the robot could fire its weapon towards that direction without smartzones if you mount your weapon on servo motors, there are AI that make your servo point to the ennemy without the help of smartzone. have a look at this thread : https://gametechmods.com/forums/showthread.php?t=1492you should also download a tazbot replica with such a AI or admire the beauty of SOW in action, viewing the Madiaba's bot in Gumba tourney. http://raw.gametechmods.com/bracket_1.htmlif you want your bot to point toward the ennemy, this is more a matter of tactics than of AI. Almost all tactics tends to move you bot toward your ennemy. basically : - tactics.py deals with the way your bot move -AIs.py : deals with the way you use smartzone and/or weapons if you want your bot to change direction to point toward an ennemy, without moving, you must write a tacticts.py. if you want your bot to move toward an ennemy, just use some tactics ("engage" is almost good for everything).
200
« on: May 25, 2009, 04:34:45 PM »
ok i checked it.
what is the thing that would tell if the desired heading is in front or behind a robot do you talk about the value to give to the 'nose' parameter in the binding line (file bindings.py) or do you talk about writing you own AI and testing the position of your bot compare to another bot ? For the first point, Madiaba talks about the value of 'nose' in the post : ... For the second point, there are few command that give information about your current position and ennemy position. i engage you to have a look at the coding of tactics.py to have usage sample. here are some command you may use : range = self.GetDistanceToID(robot_id) GetPath(self, from_world, to_world) IsStraightPathClear(self, from_world,to_world) DriveToLocation(…) plus.getLocation(IdRobot) have also a look to SOW AIs, they compare angle position of a servo motor and an ennmy.
Pages: 1 ... 3 4 5 6 7 8 9 [10] 11 12 13 14 15 16 17 ... 26
|