Redline, there is a whole plethora of potential problems that would cause initial crashes like you have described. If you send me the arena folder and correlated py, I'll look through it for you. It would help to know your objective too. What does "converting the LumaZone into an normal (Not KOTH) arena" entail? Removing the hill, changing the KOTH AI coding,... etc?
Nar, try this AI.py. It's very good at avoiding immobile countdowns. And it has a couple extra User-adjustable tweaks that you may like. ReadMe included (very easy). FBS_1
If you still cannot get it, let me know and I'll show you on MSN.
Here is the AI.py that runs most of my SOW bots: Ici!:Top_Smasher_2R Phil, (or anyone else,) if you see any places to improve it let me know.
I was going to include your 'goon' coding, but haven't had the time yet. If you want to do that and append the title '..._goon' or whatever that's fine with me. I'd like to differentiate between the 2 pys though, because I have several bots that have more than 1 servomotor on them.
Idea-1: I was actually thinking of coding an Army combat assault vehicle with 3 SOW-ed automatic cannons (ACAMS's M-guns), that would lock onto the other 3 opponents individually and open fire on each simultaneously. If/When one opponent was destroyed, then that gun would turn to assist another cannon in it's assault...and so on till all 3 were pummeling the last bot with automatic fire. What do you think?
Idea-2: I also had an idea of an ACAMS.bot that bears a SOW-ed, automatic M-gun in each arm. As soon as the buzzer sounds, he comes out of the corner with both guns blasting away...(Maybe call it "RAMBOt"... hehe).
Ok, Goose and I will take our pills and go sit down for a while.... [/COLOR][/SIZE][/U][/B] ..
If you entered GUMBA, then please send your 2 bots with bindings line to me ASAP. It shouldn't take too long since they were already turned in, so I've been told. Let's get this going...
Thanks, Sage.
Thanks, Nar.
(Don't ask what I'm doing up at this gastly hour... Have to finish a Powerpoint presentation...blah!) ..
Ok, I'll continue through with the GUMBA Tourney. Edit: Remember DSL/LW+HW. To lighten the load, anyone who can help with the splash and do the tourney chart please let me know(here/PM). I'll do all the core work (vids and editing). I'll take an inventory of bots and post those entries still needed.
BTW : Please Mad, can you post the AI you used for this bot?
I will.[/COLOR]
Gig: Nice thought.
Phil:
Quote
PS : I'm surprised about the stability of you bot, so much weight so 'high' and still a good reaction against mako head-attack.
It has a unique SRM tactic, that includes User-adjustable settings. I'll show you.[/COLOR]
Nar: This tactic: One huge advantage of an HS is that it's weapon(s) are efficient 360 degrees. This tactic facilitates the same peripheral advantage, while enabling other kinds of weapons to be used. Nar: This bot: bot: SkinHead's particular weakness is its supporting arm that holds the weapons in place. If an opponent can get to it, it is it's achilles' heal. SkinHead could be tweaked to be better, for sure. As Phil said, with some thought and time a good builder could probably make an effective bot with this tactic. I appreciate your help with making this practical and User-friendly.
Phil: I was thinking of making/adding some coding that would enable the bot to see if another bot is under it, and then activate either a servo-ed weapon or SRM to direct weapons to under it's chassis onto the opponents. I was thinking of a combo of getLocation(Z and X) to see if the 2 bots are at the same location, and then getLocation(y) of both bots to see who is under whom; and then do what needs done...
Here is a basic bot I built as a test-bot for this SOW tactic. The weapons are mounted to a Servo motor that is always directing the weapons toward the opponent in any direction. Outside and inside shots:
and the last bot of this team is Felix the cat. Not a killer, but an innovative bot with a AI that control a servo motor (will be soon delivered in the corresponding thread).
This will be one of the HW bot of this team. I have to make it more compact, relook it, certainly rename it, but it looks promising . It uses the 'SpinServo AI' which drives the servo motor.
Next post will show it finalized. ----------------------------------------------------------- -----------------------------------------------------------
Here is the reshaped "Drowned" renamed as "poison of Maatet" (one of the scorpion guard of goddess Isis)
SpinServo Ai : 2 custom zones are defined. when an ennemy enter on of theses, the servo turns to face its weapons on the good direction. thus, if 'Poison of maatet' is taken apart from behind, better then turning its all chasis, it turns its weapon.
to learn more about this AI and others, see : https://gametechmods.com/forums/showthread.php?t=1103 ----------------------------------------------------------- -----------------------------------------------------------
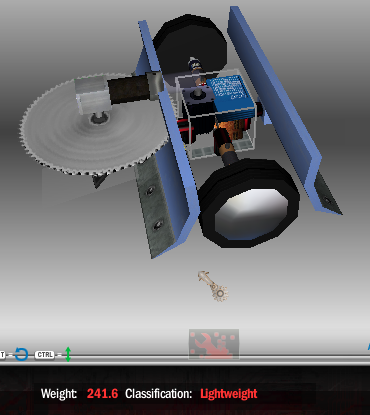
This is a LW version of a SpinServo Ai-ed Bot :
Armor is Plastic 1. Trouble : it is not realistic : weapon goes through this big wheels. Movie on the site in my signature ----------------------------------------------------------- -----------------------------------------------------------
Madiaba: Here are some vids of the bot I put together (pictured above) to give one of my ideas of how this AI tactic might be used, against some tuffer bots. It did not win all of it's battles, but it did win well over half (70-80%) of them against some well established good bots. So with a little more effort, a well/better built bot could be a contender. This one is called 'SkinHead' because it attacks from the top. But it could be a Face Spinner, Poker, Saw, HS,.. that is mounted to the Servo. Some vids of it in action:
This is a new tweak that is kosher for Stock and DSL Tourneys. And it can give an advantage to bots if constucted well. It is called "Servo Oriented Weapons" orS.O.W. This is where your weapons system(s) are attached to a servo motor, which is coded to turn your weapons so that they are always oriented toward your opponent,.. no matter which way your bot is facing. So ideally you no longer have a vulnerable back or sides, since the weapons will confront the enemy constantly. The coding is based off of Apanx's work on servo angles. It has been revised to work in this application. Several other User options I've coded into my AI.py version are things like: weapons firing control, sequential weapons firing (machinegun, rapid multiple pistons firing...), SmartZone or Location triggering, special SRM, and anti-immobility features. Phil took this work and has modded it some, but I haven't looked through it yet to see what cool things he came up with. There are some pros and cons concerning this appraoch, which will be enumerated later. A note for coders about Servo orientation control itself: SZ's can be used to control the servo, NP. But controlling the servo through python 'servoangle' is both more consistant and precise. Also, SZ Controller commands will over-ride python coded commands, if the 2 were ever in conflict.
I'll post some of my bots, and Phil has some of his that he's been tweaking out.
SR's 3d model does not have the lines that distiguish between distal and proximal features. Thus one cannot tell which way it is turning.
Serge's link has those lines added. But in each animation lines were added in specific ways/locations that distinguish different parts to be in front of the other giving the appearance of different directions of rotation.
# nose is "front" of bot- #Nose paradigm: All 360 rotational degrees for "math.pi" are represented by the factor '2'. #thus: '2'=360degrees, '1'=180degrees, '0.5'=90degrees, '0.25'=45degrees. #The direction of change(CW/CCW)is determined by the "-" or "+" before the statement. #thus: '+' causes rotation CCW, '-' causes rotation CW. #Format examples: # " 'nose':math.pi*0.25 " will rotate the bot 45degrees/CCW. # " 'nose':-math.pi*0.25 " will rotate the bot 45degrees/CW. # " 'nose':math.pi*0.5 " will rotate the bot 90degrees/CCW. # " 'nose':-math.pi*0.5 " will rotate the bot 90degrees/CW. # " 'nose':math.pi*0.75 " will rotate the bot 135degrees/CCW. # " 'nose':-math.pi*0.75 " will rotate the bot 135degrees/CW. # (Make sure there is a comma(,)after the the value # (to separate it from the next characteristic and its value). #(-----notes-----) # Note1: "math.pi" AND 'nose':math.pi*1.0 " AND " 'nose': -math.pi*1.0 " will rotate the bot 180 degrees. # (The first two are the same, and the last two just rotate different directions to get 180 degrees.} # Thus there is no real reason to have a factor greater than '1', # since after that you just move into the other half of the circle covered by the other '+' or '-' sign. # Note2: "math.pi*0" or "math.pi*2" = the same as no new heading. Take this and paste it to the top of your Bindings.py for easy reference.
How to use: 1. Find out where your bot is without any nose bias. 2. Then use this chart to turn it to face forward, NP.